Section 1-10 - Oscillations
Mass on a Spring
Simple Pendulum
Damped Oscillations
Resonance
Correlation
to your Textbook
Mass on a Spring
We started by examining a mass on a spring, placed horizontally on a
friction
less table, so that gravity and the table's normal force cancel,
leaving
the spring force as the only one to act on the mass. We know from
previous discussion that the spring follows Hooke's Law, F = - kx, the
force applied to the mass is proportional to the displacement of the
mass
from the equilibrium point and is directed opposite to that
displacement.
In general, a force which is directed opposite to the displacement, but
not necessarily proportional to it, is called a restoring force,
since
it acts to return the object to its original position.
If we disturb the mass from the equilibrium point, it will oscillate
about that point with a well defined frequency, which we find
experimentally
is independent of the degree of disturbance (i.e., pull the mass
a little ways from the eq. pt, or a long ways, and the frequency of
oscillation
is the same.). We would like to determine that exact mathematical
function that the displacement follows, x(t), and see if there is a way
to predict the frequency of the oscillation.
We can't do this problem directly, so we need to be clever and
compare
the situation to another one which we do understand. If we can
find
a system which moves under the influence of a force F = -Cx for which
we
know the motion x(t) , then we shall also know the nature of the motion
of the mass-spring system.
First, let's try a system which we shall ultimately find doesn't
work.
Consider a ball (mass m), bouncing elastically with essentially
constant
speed between two walls a distance L apart. We can certainly
define
the amplitude of oscillation,
the farthest displacement from the
equilibrium point, to be A = L/2 and w is
the
angular
frequency w = 2pf,
whose
significance will become apparent later. The ball then
moves
back and forth with constant speed. What is the force which
causes
this motion? It is shown in the figure, zero unless the ball is
actually
in contact with a wall:
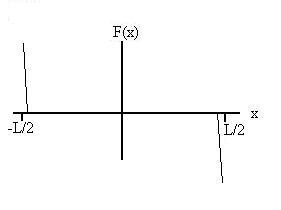
Since this F(x) is clearly not of the form
F(x) = -Cx,
the motion of the mass on the spring is not back and forth at
constant speed.
After trying out a number of systems which didn't work, let's try
one
which will. We might well guess that the functional form of the
displacement
is
x(t) = A cos(wt + f),
where A is the amplitude,
w is the angular
frequency w = 2pf,
and
f
is the phase angle, which simply
allows us to change the cosine into a sine. We need to prove
this,
however.
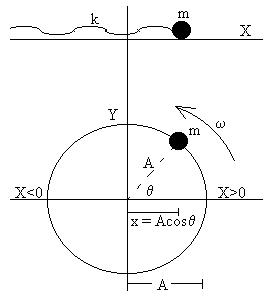
Let's consider an identical mass m moving with uniform circular motion
about a circle whose radius r we shall make correspond to the amplitude
A of the mass/spring system. We shall also adjust the angular
velocity
wof
the mass around the circle so that it completes one cycle in the same
amount
of time as the mass/spring system does.
Let us also match their motions by releasing the mass on the spring
from
x = +A at the instant that the other mass reaches x = +A, or if you
prefer,
at q = 0. You might visualize the
situation
as a toy train moving along a circular track, with its shadow projected
on the wall to represent the mass/spring. At any instant, the
location
of the mass is given by
x = r cosq = A cosq
and
y = A sinq.
Thinking back to rotational motion, we know that
q = wt,
so
x(t) = A cos(wt).
This circular motion is caused by a centripetal force,
FC = mv2/r = mw2r
=
mw2A.
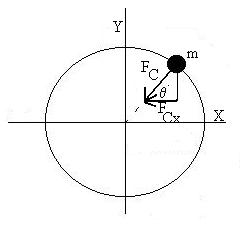 Let's consider only the x motion of the mass, which is caused by the x
component of the centripetal force:
Let's consider only the x motion of the mass, which is caused by the x
component of the centripetal force:
(FC)x = mw2A
cosq.
Note however that the force is always directed in the opposite
direction
as the mass's displacement; that is, when x>0 on the right half of
the
figure, the force (FC)x points toward the
negative
direction, and when the mass is on the left half of the figure and
x<0,
the force points toward the positive direction. To correct this,
let's insert a negative sign:
(FC)x = - mw2A
cosq.
We already stated that
x = A cosq,
so we can substitute this back into our result to obtain:
(FC)x = - mw2A
cosq = - mw2(A
cosq) = - mw2(x)
=
- Cx,
since m and w are constants.
Now, we've shown that motion of the sort
x(t) = A cos(wt)
is the result of a force of the type
F = - Cx.
We can then make the argument in reverse, that a force of the
form
F = - Cx
causes motion of the form
x(t) = A cos(wt),
and since the mass on the spring moves under the influence of just
such a force, this function describes that mass's displacement also.
Cool. Now, we might like to see if we can determine or predict
the frequency of oscillation, w.
Remember
that we set up the mass/spring system and the circular motion systems
so
that they had the same amplitudes and frequencies, and we just showed
that
their motions are identical in all respects.
F = - kx x(t) = A cos(wt)
F = -(mw2)x
x(t)
= A cos(wt)
Now, if the motions of the two masses are to be identical, the
masses
must have the same accelerations, which implies that they are acted on
by forces which, although different in nature, must be identical in
terms
of magnitude and direction. This means that the numerical
value
of the constant C for each system must be the same as for the
other!
Otherwise, different accelerations and therefor different motions would
result. So, we write that
k = mw2, or that
w = [k/m]1/2.
Now, it may bother you that the w and the
m are the values for the circular motion mass, but remember that we
required
the two masses and the two frequencies to be the same, so the result we
just obtained is valid for the mass on the spring alone.
We noted two things here. First, the frequency appears to be
independent
of the amplitude of oscillation, so it doesn't matter how far I pull
the
mass before I release it, the mass will oscillate with the same
frequency.
This type of frequency, at which a system 'prefers' to oscillate, is
called
the natural frequency. Second, the frequency depends on
the
mass and stiffness of the spring, which we then tested qualitatively.
We also took this result and found an expression for the period, P,
of the oscillation. The period is the amount of time necessary to
complete one cycle. We know that the normal frequency f =
w/2p
represents the number of cycles per second, so the period is clearly
P =1/f = 1/(w/2p)
= 2p/w = 2p[m/k]1/2.
This type of motion, x(t) = A cos(wt
+
f), is referred to as simple harmonic
motion.
When the spring is horizontal, Newton's second law is
Si Fi = - kx
= ma,
and the motion is as described above. What if the spring had
been oriented vertically, so that gravity were not cancelled? The
new
equilibrium point would be where the weight and the spring force
balance:
Si Fi = -mg
- kxEQ = 0 xEQ
= -mg/k (negative, because this equilibrium point is below the
'no-gravity'
equilibrium point).
Now let the mass oscillate. Let y' be the displacement from the
new equilibrium point, such that x' = x - xEQ.
Substitute.
Si Fi = -mg
- kx = ma
-mg - k (x' + xEQ) = ma
-mg - kx' - kxEQ = ma
[-mg - kxEQ] - kx' = ma
The quantity in brackets is known to be zero, so
- kx' = ma,
which is the same force equation (and therefore the same motion) for
the case of no gravity, except that the equilibrium point will be where
x' = 0, that is, at x EQ.
Let's see if we can determine any information about the mass's speed
and acceleration. The acceleration is easy; use Newton's Second
Law:
F = ma
F = - kx
a = - (k/m) x = - (k/m) A cos(wt + f)
= - w2A cos(wt
+ f).
The velocity is a bit harder. Let's consider the energy budget
of the mass: as the system oscillates, KE of the mass is converted to
PE
in the spring:
1/2mv2 + 1/2
kx2 = Etotal.
We can write an expression for Etotal if we look at one
extreme of the mass's motion, x = A, at which point the speed is zero
and
there is no KE. At that point,
Etotal = 1/2 kA2.
Then,
1/2mv2 + 1/2
kx2 = 1/2 kA2.
mv2 + kx2 = kA2.
mv2 = kA2 - kx2
mv2 = k(A2 - x2)
v2 = [k/m] [A2 - A2cos2(wt
+ f)]
v = +/- [k/m]1/2 [A2 - A2cos2(wt
+ f)]1/2
v = +/- [k/m]1/2 A[1 - cos2(wt
+ f)]1/2
v = +/- wA [sin2(wt
+ f)]1/2
v = +/- wA sin(wt
+ f)
Now, we have to go back to the problem to pick the correct sign.
We have been assuming that x(t) = A cos(wt +
f), so that when (wt
+
f)=0, the object is at its extreme right
position
and the velocity is zero (so far so good, since sin(wt
+
f) will be zero). In the next
instant,
the mass will be moving to the left, and so we want the velocity
function
to become negative; this means that we need to use the negative
sign.
So,
v(t) = - wA sin(wt
+
f).
To review:
x(t) = A cos(wt + f)
v(t) = - wA sin(wt
+
f)
a(t) = - w2A cos(wt
+ f)
For fun, what will be the fuctional forms for the jerk, kick, and
lurch?
j(t) = w3A sin(wt
+ f)
k(t) = w4A cos(wt
+ f)
l(t) = - w5A sin(wt
+ f)
Simple Pendulum
There are many other systems which exhibit simple harmonic motion
(SHM),
and even more which are close enough that we can make use of the
results
above for a reasonably correct approximate solution. One such
system
is the simple pendulum, which is a point mass m at the end of a
massless string or stick of length l. Let's look at the
free
body diagram for such an object.
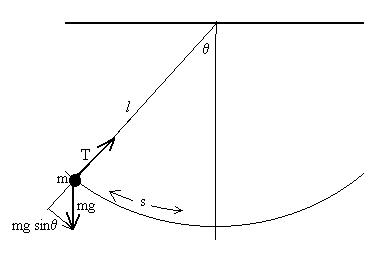
We are interested in the motion along the circular arc. Let us
describe the bob's position with s = lq,
the
displacement along the arc which we shall make positive to the
right
and negative to the left. Break the forces into tangential and
radial
components. Radially, we have
T - mgcosq = maC,
where aC is the centripetal acceleration. We're not
really interested in this.
Tangentially, we have
Ft = mg sinq =
mg sin(s/l).
We note that the force is really a restoring force, since it points
in the opposite direction along the arc as the bob's
displacement.
Let's add the minus sign as we did for the mass/spring system to
account
for the direction of the force:
Ft = - mg sin(s/l).
Now, this is not the same as the for the mass/spring system,
since F is proportional to the sine of the displacement, not to
the displacement itself. However, if an angle is small, the sine
of the angle is approximately equal to the angle itself. So we
can
make an approximation:
Ft = - mg (s/l) = - (mg/l) s.
Now, the restoring force is at least approximately of the form F =
- Cx, and we can make use of the result above. Let's compare the
two systems
F = - (k) x, where w = [k/m]1/2
F = - (mg/l) s,
so that it's clear that (mg/l) takes the place of k. Let's
substitute it into the result we already have for w:
w = [(mg/l)/m]1/2
= [mg/lm]1/2 = [g/l]1/2,
which is indeed the correct answer. In class, we tested
qualitatively
the dependence of the frequency on the length, and the independence on
the mass, and found agreement with the theory; we could not test the
dependence
on gravity, however.
In fact, you may remember back to the beginning of the year when we
discussed dimensional analysis. We looked at all of the
quantities
which might possibly affect the frequency of oscillation: mass m: [M],
string length l: [L], and gravity g: [L]/[T]2.
We saw that the only combination which could result in the dimensions
of
the period, [T], is [l / g]1/2,
or
{[L]/[L]/[T]2}1/2.
In a manner similar to that above, we find that the period of
oscillation
for a simple pendulum is
P =1/f = 1/(w/2p)
= 2p/w = 2p[
l
/
g]1/2.
Here is another example for you to work on:
Consider a torsional pendulum, a cylinder hanging from a
string.
The torque necessary to twist the string is assumed to be proportional
to the angular displacement:
t = - k q.
The cylinder is twisted through some initial angle, then
released.
What is the natural frequency of rotational oscillation of this system?
Damped Oscillations
We spoke briefly about damped oscillations. The
equations
above suggest that, if one sets the mass/spring system into
oscillation,
the total energy of the system remains constant and the mass will
vibrate
forever with the same amplitude. In fact, we know that the
mass will slow a bit on each pass due to friction with the air (usually
assumed to be a drag force of the form Ff=-bv) or
the
table; energy is removed as friction performs negative work on the
mass.
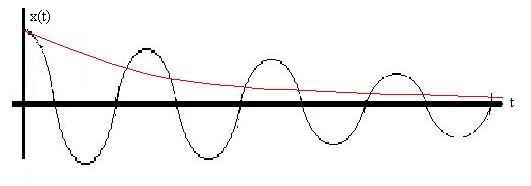
The figure shows a lightly damped system (black curve) and an
overdamped
system (red line), which loses so much energy so quickly that it never
oscillates even once. A good example of the overdamped system is
the car shock absorber. The car (m) is supported by springs (k),
so that SHM is possible. If one were to drive over a bump with
faulty
shocks, the car would then continue to oscillate at about 1 Hz for
several
seconds. Shock absorbers dampen the system so that the ride
smooths
out without the oscillations.
One caveat: the natural frequency of a lightly damped oscillation is
slightly different than the value of an undamped oscillation:
w ' = [(k/m) - b2/4m2]1/2,
where b characterizes the amount of damping.
Resonance
We returned to the notion of the natural frequency of a system.
If
one were to disturb the mass/spring system in some way and step back,
the
system will oscillate with natural frequency wo
= [k/m]1/2. If it's disturbed again in a different
manner,
the system will still oscillate at that same natural frequency, until
its
energy is depleted (see damped oscillations).
If
we want the system to continue to oscillate, we must replace the
energy
lost to dissipative forces. Let's jiggle the other end of the
spring,
applying a force though a distance (i.e., doing work), at some
frequency
w,
which is then known as the driving frequency. Let us vary
the driving frequency to see the effect on the system. If we
jiggle
the spring at a very low frequency, we see that the mass oscillates
with the same frequency at which it is driven, but with a small
amplitude.
Changing to very high driving frequency, we see once again that the
mass oscillates at the driving frequency, but with a very small
amplitude.
However, if we excite the system at a driving frequency very near to
the
natural frequency, we see that the response of the system, as
demonstrated
by the amplitude of oscillation, increases. If we plot this
response
as a function of the driving frequency, we see the curve shown here:
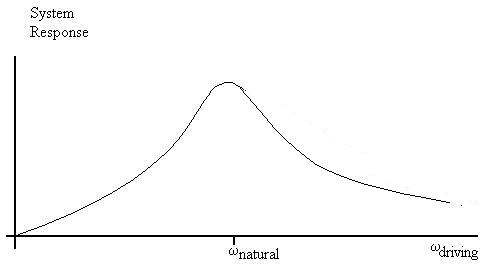
The condition when the system is driven at its natural frequency and
delivers its greatest response is called resonance.
Sometimes
resonance is desirable, sometimes not. For example, if one wants
to push a small child on a swing, the greatest amount of fun (or
terror)
is attained when one pushes the swing at its natural frequency.
On
the other hand, if the ground shakes at the natural frequency of a
skyscraper,
the building may respond with an amplitude beyond the limits of
structural
integrity. The Tacoma Narrows Bridge collapse, which was featured
in an Alpine Stereo advertisement several years ago, occured because
the
wind passing over the bridge excited one of the span's torsional
oscillation
modes, resulting in the collapse about three hours later. The
speed
of the oscillations was speeded up for the advert, but the amplitude of
the oscillations was not. Are you surprised at the incredible
elasticity
of steel and concrete? Only a dog lost its life in the collapse,
because the owner left it behind when he abandoned his car on the
bridge
(Hmm!). The bridge had exhibited strange effects for the three
months
it was open. There are films of the deck of the bridge
oscillating
in a vibrational mode much like waves in the ocean; cars could actually
disappear from view behind the humps which rose and fell in the
roadway.
A related system is that of tall skyscrapers. Once again, if the
wind were to gust at the natural frequency of the building, it might
cause
collapse; modern buildings often have a mechanism to 're-tune' the
vibrational
modes of the building away from the current driving frequency of the
wind.
Return
to Notes Directory
Continue
to Next Section of Notes
D Baum 2000