Section 1-6 - Work & Energy
Work & Energy
Conservative and
non-Conservative Forces
Potential Energy
Conservation of Mechanical
Energy & Conservation of Total Energy
Springs
Power
Correleation
to
your Textbook
Work & Energy
We started by observing an object at rest on the table, then the
same object in motion. We agreed that there is some quality
the object possesses in the later case which it lacks in the
former. Let's call that quality energy.
How was that quality transferred into the object? A force
was applied, but the force must have acted through a
displacement. Let us call the transfer of energy into (or
out of) an object the work done on the object. The
bigger the force, the more energy is transferred, and the greater
the displacement over which the force acted, the more energy is
transferred. What's more, there is an effect due to the
relative orientation of the force with the displacement:
If F and Dx are in the
same direction, energy is transferred into the object and
we say that positive work was done.
If F and Dx are in the
opposite directions, energy is transferred out of
the object and we say that negative work was done.
If F and Dx are
perpendicular, no energy is transferred into the object
and we say that no work was done.
How can we write this in a more mathematical way? Let the
work W be defined as:
W = F (Dx) cosqF,Dx,
that is, as the magnitude of the force times the magnitude of the
displacement, times the cosine of the angle between those
two vectors. So,
if F and Dx are
parallel, qF,Dx=
0o and W = FDx (positive).
if F and Dx are anti-parallel,
qF,Dx
= 180o and W = - FDx
(negative).
if F and Dx are
perpendicular, qF,Dx
= 90o and there is no work done.
The guess of the cosine function is not quite as arbitrary as it
seems. Consider a force applied at some random angle as
shown here.
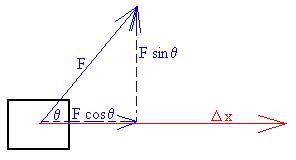
We can always decompose the force vector into a component
perpendicular to the displacement (which will do no work) and one
parallel (or anti-parallel) to the displacement which will perform
work
W = (Fcosq) Dx,
as before. This leads us to an alternate way of writing the
definition of work:
W = F|| Dx.
Indeed, we could also look at the work as the whole force times
the component of the displacement in the direction of the force:
W = F Dx ||.
| It might be useful to review vector multiplicaton
at this point. There are several types of
multiplication, of which we will discuss two.
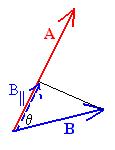
We define the scalar product (also called the inner
product or the dot product) of two vectors
A and B to be:
A.B = |A| |B| cosqA,B, = ABcosqA,B,
that is, the magnitude of A times the magnitude of B
times the cosine of the angle between them. One
interpretation of this definition is that we are
multiplying the magnitude of A vector by the
component of B that lies in the direction of A:
A.B = AB|| = ABcosqA,B.
The work is an example. We can write that W = F.Dx.
Another type of vector multiplication is the vector
product or the cross product: AxB.
We define the magnitude of the cross product to be
|AxB| = |A| |B| sinqA,B, = AB sinqA,B.
The direction of AxB is perpendicular to
the plane that contains A and B and can
be obtained by using the right-hand-rule
(RHR). Point the index finger of the right hand in
the direction of A and the middle finger in the
direction of B; the right thumb then points in
the direction of the cross product. One
interpretation of the cross product's magnitude is that
it is the area of the parallelogram formed by the
vectors A and B when they are placed
tail to tail:
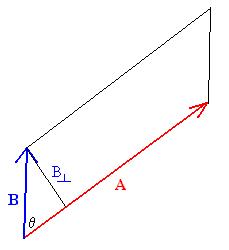
The base of the parallelogram is A and the height is
Bsinq, making the area A(Bsinq). What is the direction
of AxB in this example?
We'll discuss
quantities that can be written as cross products later. |
What if the force applied were not constant (or in other
words, we have a variable force)? Clearly, more work
would be done in some displacement intervals than in others.
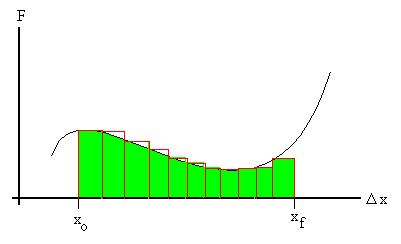
We need to break the overall displacement down into very small
displacements Dxn, over
which we can consider the force to be relatively constant at value
FDxn; we then find the work
done over that interval to be WDxn
= FDxn Dxn . Then the work done
by the force is
WF = SDxnWDxn = SDxn FDxn Dxn
This value approaches the area under the force-displacement curve
as the widths of the Dxi's
go toward zero.
W =  F .dx.
F .dx.
What if the curve were to go below the axis? Then the work
would be negative. What if the Dx
values were negative? That would also switch the sign of the
work.
What if we're working in 3d? Then we write that
W = F(r) .dr,
which gives one term in each of the x, y, and z directions.
Let's stop for a second. We've defined the work, but we can
define anything we please to be whatever we please; what's the
point? The definition is meaningful only if it is
useful. Let's think back to the beginning of this
discussion. We talked about the work on an object as a
transfer of energy, so that we should be able to say that the work
is the change in the amount of this energy stuff that the
object possesses, i.e., W = DE.
Keep this in mind as we do a little derivation:
Consider the two relations, where the acceleration is not
constant:
a = dv/dt and v
= dr/dt
This time, let's perform a dot product on each side to obtain
a . dr/dt = v .
dv/dt
a . dr = v . dv
We might assume that the acceleration is a functiom of time, but
it might as well be a function of position instead.
a(r) . dr = v .
dv
Let's make use of Newton's second law, FNET =
ma, to obtain
(1/m) FNET(r) . dr
= v . dv
and integrate
(1/m) r1 r2
FNET(r) . dr = vivf
v . dv
r2
FNET(r) . dr = vivf
v . dv
The left integral is the total work done on the object, WNET.
(1/m) WNET
= 1/2 (vf2
- vi2)
or
WNET
= 1/2
m vf2
- 1/2
m
vi2
Well, this is interesting. We've found a quantity for which
the work done on an object is the change in the amount of that
quantity the object possesses. That sounds a lot like the
energy. Let's tentatively define the energy E as 1/2mv2. Let's be
a bit more specific; when we spoke of the quality the demonstration
object possessed as the energy, it possessed said quality due to its
motion, so we shall define the kinetic energy 1/2mv2 as energy by virtue of motion.
WTOT = DKE.
This last relationship is called
the work-energy theorem. It is the second 'picture'
of the three we shall use to solve problems, the first being
forces and accelerations.
| Net force |
causes |
change in velocity (acceleration) |
| Net work |
causes |
change in kinetic energy |
| ? |
causes |
change in ? |
Note that it is nothing more
than Newton's Second Law, combined with two definitions.
Why bother? We will find that this picture will be on
occasion more convenient to use than forces and accelerations,
especially in cases where we don't need to know the time a trip
takes, or when the acceleration is not constant (see Note 1 below).
Note also that work is a
scalar. Since the kinetic energy depends on the speed of
an object, and not the direction of the object's motion, it is a
scalar; the work is the change in the KE, so it too is a
scalar. Although we did this derivation for one dimension,
it can be done quite easily for three with the same result (see
Note 2 below). A combination of
these arguments let's us assert that the result is valid even
for variable forces in three dimensions.
Here are some examples:
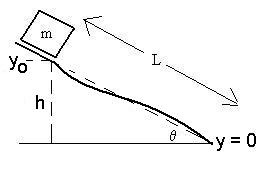
Consider a block of mass m = 5
kg at the top of a frictionless ramp L = 2 metres long, which is
inclined at q = 37o to the
horizontal.
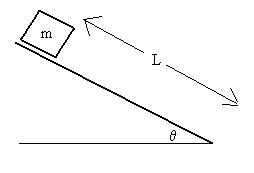
If the mass starts from rest at
the top, how quickly will it be moving when it reaches the
bottom? Draw a free-body diagram:
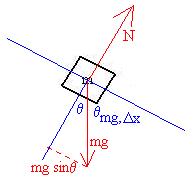
WN = 0, since the force is perpendicular to the
displacement
Wg = mg L cosqmg,Dx
WN + Wg =
1/2mvf2 - 1/2mvi2
mg L cosqmg,Dx
= 1/2mvf2
vf2 =
2g L cosqmg,Dx
vf =
[2g L cosqmg,Dx
]1/2 = [2*10*2*cos53o]1/2 =
4.9 m/s.
Now, let's suppose that the block started out with an initial
velocity of 6 m/s down the plane. Make a guess what the
speed will be at the bottom:
Let's work it out:
WN + Wg = 1/2mvf2
- 1/2mvi2
mg L cosqmg,Dx
= 1/2mvf2
- 1/2mvi2
vf2 =
2g L cosqmg,Dx
+ vi2
vf =
[2g L cosqmg,Dx
+ vi2]1/2
= [2*10*2*cos53o + 62]1/2 = 7.7
m/s.
Are you surprised? What went wrong with your guess?
Isn't the acceleration the same in each case?
Why isn't the change in velocity the same?
Here is another throught
question: Suppose that I drop an object from a given
height; the force of gravity (the object's weight) does work and
the kinetic energy of the object increases. Now, suppose
instead that I slowly lower the object slowly from the same
initial altitude. Compare the work done by gravity in the
second case to the work done in the first case.
What about the total work done in
each case?
Conservative and
non-Conservative Forces
Let's divide the realm of forces in to two categories: conservative
forces and non-conservative forces. This may
seem rather facile, in that I could divide forces in to red and
non-red categories, and each force would have to fit into one of
them. However, this is a distinction which we will find
useful.
There are a number of ways to define what a conservative force
is. I like to say that a conservative force is one for which
the work it does on an object moving from Point A to Point B is
independent of the path the object takes. Let's take the
weight of an object as a concrete example. Suppose that I
lower a mass m from a height h above the table to the top of the
table. I'm only interested at this point in what the weight
does, not what any other force, such as from my hand, does.
The force is mg downward, and the displacement is h downward, and
those two vectors are parallel, so we have that
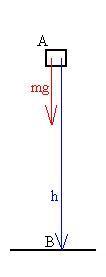
Wg = (mg)(h)(cos0o) = mgh.
Now, let's take the object on a little tour of the region.
Move it horizontally a displacement s, then down h, then
horizontally again s', back to point B:
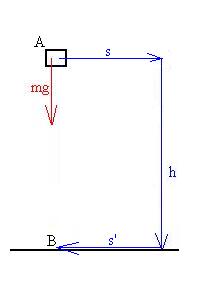
The work done will be
WAB = mg s cos 90o + mg h cos 0o
+ mg s' cos 90o = mgh,
again.
Let's pick a random path:
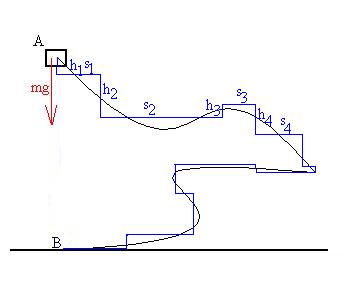
You might be able to see that we can always approximate any path
to an arbitrary degree of accuracy with these stepped horizontal
and vertical movements. From previous discussion, we know
that any horizontal movements will correspond to no work being
done by gravity. The vertical displacements are each of
magnitude hi , some parallel to the weight and some
anti-parallel, such that the work done by the weight during each
vertical motion is
Wvertical = Snmg
hn cosqn
= mg Sn hncosqn, where cosqn
= +1 if the displacement is downward (parallel to the force) and
-1 if the displacement is upward (anti-parallel to the force).
We realize that Sn hncosqn = h,
and see that
Wvertical = Sn
mg hn cosqn
= mgh,
as before, so that the work done by the weight throughout the
whole trip is
WAB = mgh,
independent of the path taken.
Let's consider an example of a non-conservative force:
friction. Consider an object being slid across a table top
along two paths (let all Dx's be the
same magnitude):
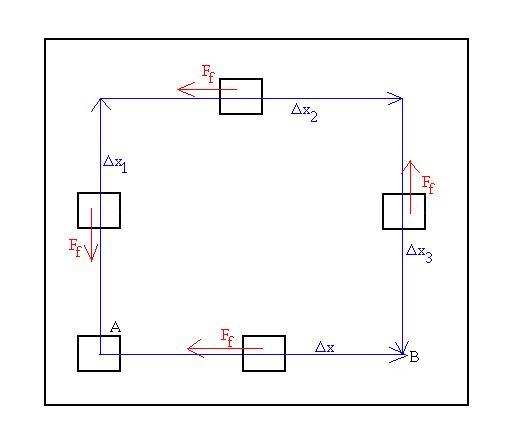
Remember that we are not concerned with the work done by any other
force, such as that of the hand which pushes the block.
The frictional force will be (not proven here):
Ff = mKmg,
so that the work done by friction from Point A to Point B along
the direct path is
Wdirect = Ff Dx
cos(180o) = -mKmg
Dx.
Along the indirect path, this will be three times bigger:
Windirect = -mKmg
Dx1 - mKmg
Dx2 - mKmg
Dx3. = -3mKmg
Dx.
So, we see that friction is not a conservative force.
Potential Energy
Let's consider the dropped pen again. We can say that during
its fall, the pen is acted on only by the force of gravity, which
then causes a change in the pen's kinetic energy (work-energy
theorem). We can develope an alternate notion, by saying that
energy is somehow stored in the pen by virtue of its altitude above
the table, and that this potential energy is then converted
to kinetic energy as the pen falls. The idea of potential
energy is really only a bookkeeping device, a different way of
looking at work. What we find is that any conservative force
can have a potential energy function associated with it. For
example, if a conservative force does positive work on an object so
that the KE increases, we could alternatively say that the
PE of the object is decreasing while the KE is increasing, and vice
versa. So, for a given conservative force, Wcons
= - DPE.
To do this, we divide the total work on an object into two types,
depending on whether each force is conservative or
non-conservative:
Wcons + Wnon-cons = DKE
- DPE + Wnon-cons = DKE
Wnon-cons = DKE + DPE.
Remember that there may well be more than one conservative force
operating on the object, which would require us to have more than
one DPE term. Also remember that
one should not put the term on both sides of the relationship;
don't count gravity's effect as both a work and as a potential
energy.
Can we figure out what the gravitational potential energy
function is? Not really. We can only figure out an
expression for the change in the PE. Suppose that we
let y be the vertical location of the object, and that we lift (or
lower) the object by some displacement Dy.
The force of gravity is of course downward, so if we lift the
object, Dy is positive, the angle
between the weight and the displacement is 180o, so the
work done is equal to (mg)(Dy) (-1) =
-mg Dy, while the change in PE is the
negative of that, or +mgDy. If we
lowered the object, the signs of each term (work and DPE) would correspondingly reverse.
So
DPEgrav = mg Dy,
and it seems O.K. to say that
PEgrav = mgy,
so long as we keep in mind that the assignation of PE = 0 is
arbitrary.
Later, we'll discuss the potential energy from a different
conservative force.
As an extra comment, consider the following:
DPE = -W
d(PE) =
-F(x) dx
Then,
d(PE) = -F(x) dx
F(x) = - d(PE)/dx
Conservation of
Mechanical Energy
In the absence of non-conservative forces, or at least of
non-conservative forces that do work,
Wnon-cons = DKE + DPE
becomes
0 = DKE + DPE.
Let's write this out more explicitly:
0 = KEf - KEi + PEf -
PEi,
which can be re-written as
KEi + PEi = KEf +
PEf .
This says that, in the absence of non-conservative forces (or at
least of such forces which do work), the total mechanical energy
is conserved. When some quantity is conserved, it
means that one ends up with the same total amount one started with;
the energy may change form, but it is neither created nor destroyed.
Here are the results of an experiment measuring the PE and KE of an
object as it slides down a frictionless incline (Fadul, Didolkar,
& Gowda, 2002):
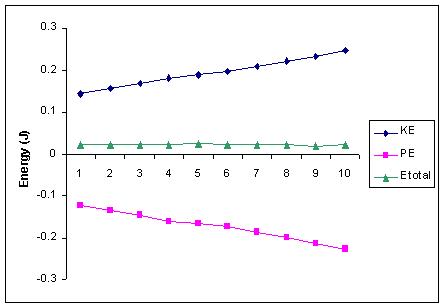
Note that, as the PE decreases, the KE correspondingly increases,
but that the total energy remains constant (to within experimental
error).
Example:
Consider a block of mass m = 5 kg
at the top of a frictionless ramp L = 2 metres long, which is
inclined at q = 37o to the horizontal.
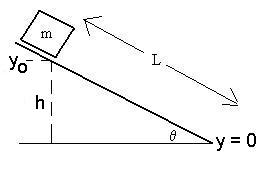
If the mass starts from rest at
the top, how quickly will it be moving when it reaches the
bottom?
Wnon-cons = DKE + DPE
Draw a free-body diagram:
There are two forces acting on the mass: the weight and the normal
force. As before, WN = 0, since the force is
perpendicular to the displacement. On the other hand, the
weight is a conservative force, and can be dealt with on the right
side of the equation.
0 = 1/2mvf2
- 1/2mvi2 + gmyf -
gmyi
We can set yf = 0 and then yi = h =
L sinq = 2*0.6 = 1.2 m. Then,
0 = 1/2mvf2
- gmyi
1/2mvf2
= gmyi
vf2 =
2gyi
vf2 =
[2gyi]1/2 = [2*9.8*1.2]1/2
= 4.9 m/s, as before.
O.K., you might ask, why bother? The answer should be apparent
in this example:
Here, the mass does not slide uniformly down a straight
surface. The force acting on the mass as it goes down the
slide varies as gmsinq, so the
acceleration would not be constant. Likewise, the work done by
the weight on the block would be difficult to calculate directly
(that would require some integration and we would have to know the
exact shape of the slide.). However, this problem still fulfuills the
requirements for conservation of mechanical energy: since the normal
is always perpendicular to the path taken, no non-conservative
forces do any work. We can find the speed of the block at the
bottom of the slide regardless of the shape of the slide.
This concept of the conservation of mechanical energy is not quite
the same as conservation of total energy, which you may have
heard of in your other classes. This is a much more restricted
form of that concept.
For example, let's look once again at the falling pen. Just
after release, the pen has zero KE and mgh of PE (we'll let PE = 0
at the table top). Just before hitting the table,
the PE = 0 and the KE is not zero, and in fact equals numerically
mgh:
KEi + PEi = KEf + PEf
0 + mgh = 1/2mvf2 +
0.
Right after the pen hits the table, it has no PE and no
KE! What happened to the energy?
Now in a more general way, we can
talk about the conservation of total energy, but only if we
broaden the definition of energy. You may remember from your
other classes that the molecules in solids can be modeled by balls
connected by springs, and that the balls are constantly vibrating,
possessing kinetic (and potential) energy . This KE is
different (in a fashion) from the translational KE
discussed above, in that for TKE, every particle shared the same
velocity vector, but for vibrational KE, the motions are
more random. When the pen hit the table, shock waves went
out from the impact through both the table and the pen, increasing
the vibration of the molecules in each object. This
increased thermal energy is observed macroscopically as an
increase in the temperatures of both the table and the
pen. Other energy is carried away as sound, which
eventually warms the other objects it hits.
Springs
If we were to look at a spring,
we would notice that it has a natural or relaxed length at
which there is no tension. Let's connect the one end of the
spring to a wall, and let c represent the
displacement of the other end from its relaxed position. In
this course, at least for now, we shall assume that all springs
obey Hooke's Law: the force necessary to stretch
(compress) a spring from its relaxed state (say, where c = 0) is
proportional to the amount of stretching (compression). In
more mathematical terms:
F = k c.
The symbol k represents the spring
constant of the spring, the number of newtons required to
stretch (compress) the spring one metre, and is given in
N/m. A high value of k means that the spring is stiff.
We need to be a bit careful about
signs. The relationship above is the force which needs to be
applied to the spring to stretch (compress) it, and that
force needs to be in the direction of the displacement of the end
of the spring. However, we are often interested in the force
applied by the spring to some other object, which (by the
Third Law) would be in the opposite direction:
Fon spring = k c
Fby spring = - k c.
Since we are sometimes in the
habit of writing down the magnitudes of forces and adding in the
appropriate signs as necessary, I shall write this relationship
this way
F = (-) kc
with the minus sign there to remind you that the force exerted by
the spring is in the direction opposite to that in which the spring
is stretched.
Is the spring force conservative? A quick look suggests
that it is. Since the force exerted by the spring depends
only on the position of the end of the spring (we'll assume that
the other end is fixed), reversing the displacement back over
already covered ground simply undoes the work done the first time
(by flipping the sign of the cosine term), so that the net work
done depends only on the initial and final positions of the end of
the spring.
How much work is necessary to stretch (or compress) a spring
distance x from its relaxed position? We can use the
graphical representation showing Fon spring as a linear
function of c (slope = k):
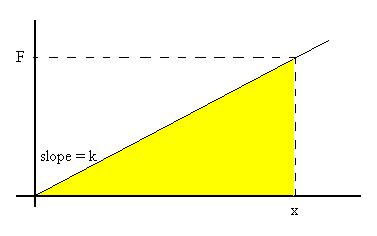
We showed previously that the work done by any variable force is
represented by the area under the curve. Since this is a
triangle, the area is one-half the base times the height:
A = 1/2bh = 1/2(c) (F) = 1/2(c)(kc) = 1/2kc2.
So, the work done on the spring is 1/2kc2, the work done by the
spring is -1/2kc2,
and the change in the PE of the spring is the negative of that, or
DPE = +1/2kc2.
If we define the PE to be zero at c =
0 (the relaxed position), then we can say more simply that PEspring
= 1/2kc2.
Let's do this again using calculus. Move the spring from
its relaxed position to some arbitrary position, c.
Won spring = 0 c Fspring(c) dc = 0 c
kc dc =
1/2kc2 -
0.
The work done by the spring will be, by the third law,
Wby spring = - 1/2kc2.
Then, since DPEsp = - W by
spring,
PEsp f - PEsp i = + 1/2kc2.
Since we can choose the PE to be zero wherever we please, it seems
natural to define PEsp = PEsp i = 0 when the
spring is relaxed, so that
PEsp = 1/2kc2.
Now, some fun with springs. Occasionally, we see more than
one spring attached to an object. What would be the
effective spring constant of more than one spring, i.e., what would kEFF
for a single spring be to do the same job as the multiple springs?
If the springs are both attached to the object, it's easy:
FIGURE
FTOT = F1 + F2 = -k1c1 - k2c2 = -(k1 + k2)
c = -kEFF c; kEFF = k1
+ k2.
If the springs are attached end to end,
FIGURE
FTOT = F1 = F2
c1 + c2 = cTOT
F1/k1 + F2/k2 = FTOT/kEFF
1/kEFF = 1/k1 + 1/k2
A few loose ends to tidy up.
If, for a conservative force, D(PE) = -W
= -F(x) dx, then
d(PE) = -F(x) dx,
and then
d(PE) = -
F(x) dx, and then
F(x) = - d(PE)/dx.
That is, if we know the potential energy function for a force,
it's fairly straightforward to find an expression for the force
itself. This works in 3d as well:
F(x, y, z) = -d(PE)/dx i - d(PE)/dy j - d(PE)/dz
k.
This is sometimes written as F(r) = - grad
(PE(r)).
There is a nice test to see if a force is conservative or not:
if curl F(r) = 0, the force is
conservative.
Now, curl F =
i
j k
d/dx d/dy d/dz
Fx Fy Fz
= (dFz/dy - dFy/dz) i + (dFx/dz - dFz/dx) j
+ (dFy/dx - dFx/dy)k
N.B.: In older books, you might see this as rot F
= 0.
Power
Power is the rate at which energy is put into, or removed
from, an object, or the rate at which work is done:
Paverage = dW/Dt.
Pinstantaneous = lim Dt->0dW/Dt = dW/dt.
I use the symbol 'd' for technical
mathematical reasons having to do with the non-differentiability of
work.
We obtain an interesting result if we re-introduce the definition
of the velocity, v = dx/dt:
P = dW/dt = [F dx
cosq]/dt
= Fcosq[dx/dt]
= Fvcosq.
Examples:
A 2 kg block situated on a rough incline is connected to a spring of
negligible mass and spring constant k = 100 N/m that runs over a
massless, frictionless wheel. The block is released from rest
when the spring is unstretched, and the block moves 20 cm down the
incline before coming to rest. Find the co-efficient of
kinetic friction between the block and the incline.
Start with the Work-Energy Theorem:
WNC = DKE + DPE
What forces act on the block? There's the weight, the normal
force from the plane, friction, and the spring force. The
weight and spring force can be treated as potential; energy terms,
and the normal force does no work (it's perpendicular to the
displacement). The friction acts up the plane as the mass moves
down the plane (i.e., cosqF,Dx = -1). Use NII to find Ff.
Let perpendicular/upward be positive y:
N - mgcosq = may = 0
Ff = mKN = mKmgcosq
Then,
-mKmgcosq
Dx = KEf -
KEi + PEgf
- PEgi
+ PESf - PESi
Since the mass starts and ends
at rest, both KE terms are zero. The spring starts out
unstretched, so PESo = 0, Let y = 0 where the
mass comes to rest, so that PEgf = 0.
-mKmgcosq
Dx = - PEgi + PESf
= -mgyi + 1/2k[c]2
We need to relate the vertical
height yi
to the distance down the plane Dx: yi = Dx sinq.
-mKmgcosq
Dx = -mgDx sinq + 1/2k[c]2
mK = [mgDx sinq - 1/2k[c]2]/mgcosq Dx =
[sinq - 1/2[k/mg]c]/cosq = tanq - kDx/2mgcosq
mK = tan37o - 100(0.2)/2*2*9.8*cos37o
= 0.11
Another Example:
Consider a massless spring of
constant k hanging from the ceiling. Let's attach a mass m
and allow the mass to settle very slowly to an equilibrium
point.
A) How far does the spring
stretch? What is the total energy in this situation?
Now, let's raise the mass back
to the spring's relaxed position and drop it.
B) How quickly is the mass
moving as it passes through the equilibrium point?
C) How far will the mass drop
before stopping?
Let's let where the spring is
relaxed be y = 0 and let y be positive upward. When the
mass is first attached, the KE is zero (no motion), the PES
is zero (the spring is relaxed) and the PEg is zero
(because we said so), so the total mechanical energy is
zero. Once we lower the mass to its equilibrium position
and let go, we know that the net force on it is zero:
-mg - kc = 0,
so c = Dy = yf
- yi
= yf = -mg/k
It makes sense that this is a
negative number, since the mass would certainly have
descended. Since the mass is at rest, there is no KE, and
the PES will be
PES = 1/2k[c]2
= 1/2k[yf]2 = m2g2/2k
and the PEg will be
PEg = mgyf
= - m2g2/k,
meaning that the total energy
is
ETOT = -m2g2/2k
<
0!
How can this be?
Now, return the mass back to
the spring's relaxed position and drop it. What is the
total energy as it passed through the equilibrium point?
Well, we can write an
expression, but can't actually calculate it:
ETOT = PES
+ PEg + KE
Now, the PEs we did above: m2g2/2k
+
-m2g2/k = -m2g2/2k
Note that we do expect ETOT
to be zero, since this time there were no non-conservative
forces, and mechanical energy should have been conserved. So th
eKE should by given by
KE = ETOT - PETOT
= 0 - -m2g2/2k = +m2g2/2k.
From this, we can find the
mass's speed as it passes through the equilibrium point:
v = [m/k]1/2g.
Eventually, the mass will stop
(KE = 0) and then start moving back upward. Where does
this happen (yff)?
ETOT = 0 = KEff
+ PESff + PEgff = 0 + 1/2k[yff]2
+ mgyff
Note that there are two
solutions to this: yff = 0 (i.e., at the top)
and yff = -2mg/k.
Another Example:
A toy gun launches its projectile by means of a spring, with
unknown spring constant k. If the spring is compressed 0.12
m from its relaxed position and fired vertically, the gun can
launch a 20g projectile from rest to a height of 20m above its
initial position. Find the spring constant k and the speed
of the projectile as it passes through the spring's equilibrium
position (This is S&F 5-28):
Assuming no friction, we can say that there are no
non-conservative forces doing work. So,
WNC = 0 = DKE + DPEGRAVITY + DPESPRING
0 = 1/2mvf2 - 1/2mvi2
+ mgyf - mgyi + 1/2kcf2 - 1/2kci2
Here, c represents the amount the
spring is stretched or compressed and y is the altitude of the
ball.
The object starts at rest and ends at rest, so vi = vf
= 0.
Let the vertical reference level be where the spring is relaxed,
so yi = ci = -
0.12 m, yf = 20m, and cf
= 0 (the spring is again relaxed):
0 = mgyf - mgyi - 1/2kyi2
1/2kyi2 = mgyf
- mgyi
k = 2mg[yf - yi]/yi2
= 2*0.02*9.8[20 - - 0.12]/(0.122) = 547
N/m
Now, go back and find the speed of the object as it passes the
spring's relaxation point. Use the same basic relationship:
0 = 1/2mvf2 - 1/2mvi2
+ mgyf - mgyi + 1/2kcf2 - 1/2kci2
but now, vi = 0, yf = xf = 0,
and ci = yi =
-0.12 m.
0 = 1/2mvf2 + - mgyi
- 1/2kci2
1/2mvf2 = mgyi
+ 1/2kci2
vf2 = 2gyi + (k/m)cio2
vf = [2gyi + (k/m)ci2]1/2
= [2*9.8*(-.12) + (547/0.02m)(-0.12)2]1/2 =
19.3 m/s
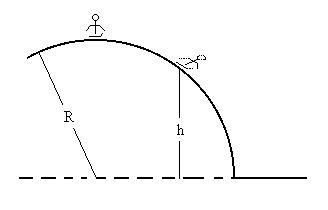
Yet Another Example:
Consider a skier at the top of a hemispherical knoll of radius R,
which is covered in slippery snow. He starts from rest at
the top and travels down the side. At what vertical distance
h from the ground will he become airborne?
What forces act on the skier? Are any non-conservative
forces doing work?
So,
WNC = DKE + DPEg
0 = 1/2mvf2 - 1/2mvi2
+ mgyf - mgyi
Let y = 0 at the bottom of the hill so that yi = R, yf
is then the number h we're asked for, and let vi =
0 (starts at rest).
0 = 1/2mvf2 + mgyf
- mgR
While he is on the slope, his path is circular, and so there is some
combination of forces acting centripetally:
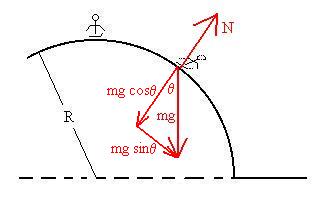
-N + mgcosq = mv2/R
At the point he loses contact with the ground, N = 0:
Rmgcosq = mv2
Pick this as the final situation and substitute into the energy
equation:
0 = 1/2[mgRcosq] +
mgyf - mgR
We seem to have two unknowns, yf and q,
but they are related in this way:
yf = Rcosq,
so that
0 = 1/2[mgyf ] + mgyf
- mgR
R = 3/2yf
h = yf = 2/3R
Note 1:
Here is a way of looking at cases of non-constant aceleration (and
correspondingly, variable forces). Let's break the interval up
into N very short segments of displacement such that the
acceleration is approximately constant over each. Then, for
each segment, i, it is still true that
Wn = 1/2 mvnf2 -
1/2 mvni2
So, the total work over all of the N intervals would be
WTOT = Sn 1/2
mvnf2 - 1/2 mvni2
Now, we need to remember that the final speed of one interval will
be the initial speed of the next interval, so all of these terms
will drop out except for the first initial speed and the last final
speed:
WTOT = 1/2 mvNf2
- 1/2 mv1i2 = 1/2
mvf2 - 1/2 mvi2,
as before.
Note 2:
In three dimensions, we consider the three directions independently,
taking the components of each force and multiplying by the
displacements in each respective direction:
WTOT = Sn [FnxDx + FnyDy
+ FnzDz].
All other combinations, such as FnxDy
or FnzDx, result in zero work,
since those force components are perpendicular to the respective
displacement components.
WTOT = Sn
FnxDx + Sn
FnyDy + Sn
FnzDz,
WTOT = [Sn Fnx]Dx + [Sn
Fny]Dy + [Sn
Fnz]Dz.
Use Newton's second law in component form:
Sn Fnx = max;
Sn Fny = may;
Sn Fnz = maz
WTOT = [max]Dx +
[may]Dy + [maz]Dz.
For each direction use the corresponding kinematic equation in the
form: v2 = vi2 + 2ad, to get
WTOT = m*1/2[vx2 -
vix2] + m*1/2[vy2
- viy2] + m*1/2[vz2
- viz2].
Re-arrange terms to get
WTOT = 1/2 m[vx2
+ vy2 + vz2 - vix2
- viy2 - viz2]
= 1/2 m[vx2 + vy2
+ vz2] - 1/2 m[vix2
+
viy2 + viz2]
WTOT = 1/2 mv2 -
1/2 mvi2
as before.
Return to Notes Directory
Continue to Next Section of Notes
D. Baum 2000